


记者 |
哈佛大学在软体机器人研究上又迈出了重要的一步。
据哈佛大学约翰·A·保尔森工程与应用科学学院(下称SEA)官网和Tech Explorist报道,6月2日,哈佛大学约翰·A·保尔森工程与应用科学学院(SEA)的研究人员开发出了最新型的软体机器人,它可以应用于太空探索、搜索和救援系统、仿生学、医学手术与康复等领域。
这款新型机器人由空气驱动,并用一个输入器代替了多个控制系统,使机器人在不受约束的同时,还能简化控制、减轻重量。
软体机器人被业内视为机器人技术的未来,相较于硬性机器人而言,它有可挤入狭小空间、碰撞后能尽快恢复等优点。
但目前来说,软体机器人在设计上仍有许多局限。其中最大的一个问题就是,软体机器人通常需要拴在输入线上,这意味着它们必须通过提供压缩空气的管道和控制其系统的电线与外部设备相连。但这些管道和电线在很大程度上束缚了软体机器人功能的发挥。

而如今哈佛大学研发的这款软体机器人,则可将其驱动过程大大简化,从而解决这一难题。
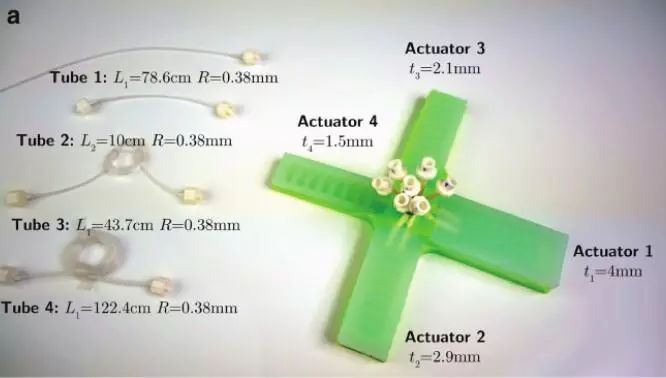
该机器人被设计成十字形,有四条“腿”,每条“腿”都相当于一个执行器,各执行器上含有八个由细小通道连接的气室,顶部则留有七条接口,用于接通输送压缩空气的管道。
这项研究论文发表在《软体机器人学》杂志上。
哈佛大学应用力学教授卡蒂娅·贝尔托迪(Katia Bertoldi)在论文中表示,该项研究首次提出了这种基于流体粘性现象来制造软体机器人的方法。使用该方法的软体机器人其驱动结构将比以往的更为简单、容易。
该方法通过使用不同直径的管子来控制空气在软体机器人装置中的移动速度,即一次性通过其中一个管泵输送相同数量的空气,管的大小将决定空气流动的方式和位置。
比如将三根直径为0.79mm、长度相同的管子接在机器人上,再接通一根直径为0.38mm的长管输送气流。它其中的一条“腿”就能充满空气并弯曲起来,而另外三根上接通的管道由于直径更粗并且长度相同,因此输送压缩空气的时间较短,其余三端可几乎同时鼓起落下。

不同长度的管子分别接在机器人顶部的接口上,不同的粗细、长度和接通方式都会对机器人的运动方式有所影响。
例如将四条直径均为0.38mm,长度分别为78.6cm(输入空气)、10cm、43.7cm及122.4cm的管子配置于该机器人上,并将这些管子按顺序连接起来,接通压缩空气。
那么该机器人的执行器最终会按照设定好的顺序,即右-上下-左的顺序依次进行弯曲,从而向前爬行。
如果将管子接口的位置和次序调换一下,执行器充气的顺序就会发生变化,利用这一方式,该机器人即可实现不同方向的运动。
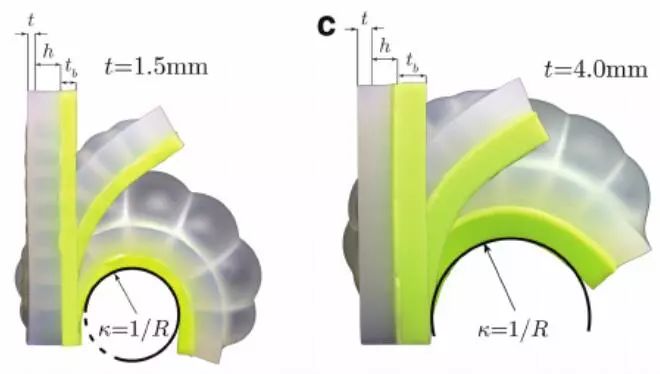
此外,由于每个执行器的大小、厚度不尽相同,在输入等量空气时,弯曲的程度也不同,因此运动的距离也会有所差别。
但由于输入压缩空气的速度与量是不变的,调控管子就能够决定空气输送的位置和顺序。因此它不再需要复杂的空气压缩计算和控制。
研究人员尼古拉斯·瓦西奥(Nikolaos Vasios)表示,在这项研究之前,人们还不能在没有独立控制每个驱动器的情况下,通过单独的输入线、压力源以及复杂的驱动过程来构建软体机器人。
该项目是人们朝着完全不受约束的简单驱动软体机器人研发迈出的重要一步。目前哈佛大学正在探索这项技术更多的商业化机会。
