


文|极智GeeTech
任何一项技术在诞生伊始,围绕发展路线的争论总是伴随左右,智能辅助驾驶技术也不例外。
该选择从L2到L4级的渐进式发展,还是直达L4终点的跨越式发展?是追随纯视觉技术路线的极致简化,还是坚守多传感器融合的冗余安全?行业标准的统一化与车企定制化如何平衡?垂直整合与开放联盟的博弈将走向何方?
这些悬而未决的命题,恰恰证明了技术创新的旺盛生命力。在持续探索与实践验证中,智能辅助驾驶的未来演进图谱正逐渐清晰。
三级架构下的算力跃升
过去十年,智能辅助驾驶系统的算力实现了从量变到质变的跨越,其核心支撑在于“云端训练-边缘推理-车端执行”三级架构的深度落地。通过将计算负荷从资源受限的车端向云端迁移,释放出指数级增长的算力潜能。

云端作为智能辅助驾驶的“超级大脑”,已成为模型训练、数据闭环与算法迭代的核心载体。在端到端模型训练与Corner Case场景挖掘领域,云端算力的规模直接决定了智能辅助驾驶系统的进化速度。
全球范围内,特斯拉云端算力已突破88.5EFLOPS;国内阵营中,吉利星睿智算中心以23.5EFLOPS领跑,华为突破10EFLOPS,理想与小米均达8.1EFLOPS,小鹏则计划于2025年将云端算力从2.51 EFLOPS跃升至10EFLOPS,构建更强大的训练基座。
车端作为实时决策的“边缘终端”,算力正以指数级增速向千TOPS级别发起冲击。L2级任务如自动泊车、城市NOA需数十至数百TOPS支撑,而L3及以上级别则需突破1000TOPS门槛,以满足端到端模型实时推理需求。
在热门的智能辅助驾驶方案中,蔚来NIO Pilot的车端算力达到1016TOPS;特斯拉FSD以720TOPS的算力紧随其后;小鹏XNGP、理想AD PRO、小米Xiaomi Pilot Max、比亚迪天神之眼A和极氪千里浩瀚H7则实力相当,均为508TOPS;与之相比,华为ADS3.0的车端算力稍显逊色,约为200TOPS。
边缘算力作为车云协同的“神经节点”,承担着车端、路侧与云端数据的实时协同重任,其标准化进程直接影响L3级以上智能驾驶的落地效率。通过提升局部环境感知精度与交通优化响应速度,边缘算力正成为高阶智能驾驶不可或缺的技术基座。
高阶智能辅助驾驶迈向“技术平权”
中国智能辅助驾驶正沿着场景复杂度梯度持续突破:从高速NOA在结构化道路实现自动变道、匝道通行等基础功能,到城市NOA攻克红绿灯识别、无保护左转等城市复杂场景,最终将实现全场景车位到车位(Door to Door,D2D)贯通,构建“地库-城区-高速”全链路智能驾驶体系,并融合自动充电、跨楼层泊车等终极场景。
这一演进轨迹不仅标志着技术范式从“规则驱动”向“数据驱动”的根本转变,更意味着高阶智能驾驶从“特定场景辅助”向“全旅程智能赋能”的价值跃升,其核心驱动力源于算法、数据、算力的三元协同突破。
算力端通过三级架构实现量级跃迁,数据端依托真实与合成数据双轮驱动突破长尾场景瓶颈,算法端从“规则引擎+模块堆叠”向“数据引擎+端到端集成”进化,完成“感知-决策-控制”全链路优化。
2025年,高阶智能驾驶的“科技平权”趋势显著提速。比亚迪将高速NOA功能下探至8万元车型,小鹏城市NOA覆盖至15万元级市场,其余主流车企也将城市NOA功能下沉至10-20万元车型,高阶智能辅助驾驶的科技平权愈发显露。
高阶智能辅助驾驶科技平权的实现是软件增效、硬件降本、规模扩产三力共振的结果。在科技平权的推动下,L2及L2+高阶智能辅助驾驶的市场规模与渗透率呈现爆发式增长,预计L2+渗透率将从2024年的8%跃升至2025年的15%,乘用车高阶智驾市场正迎来爆发式增长周期。
数据闭环助推技术应用“降本”
当前,智驾辅助驾驶系统正经历从“硬件冗余堆砌”到“算法定义感知”的范式转换,数据闭环生态成为这一变革的核心载体。从车端多模态传感器被激活进行采集开始,整台“数据机器”的齿轮便开始转动、啮合、协同运作。
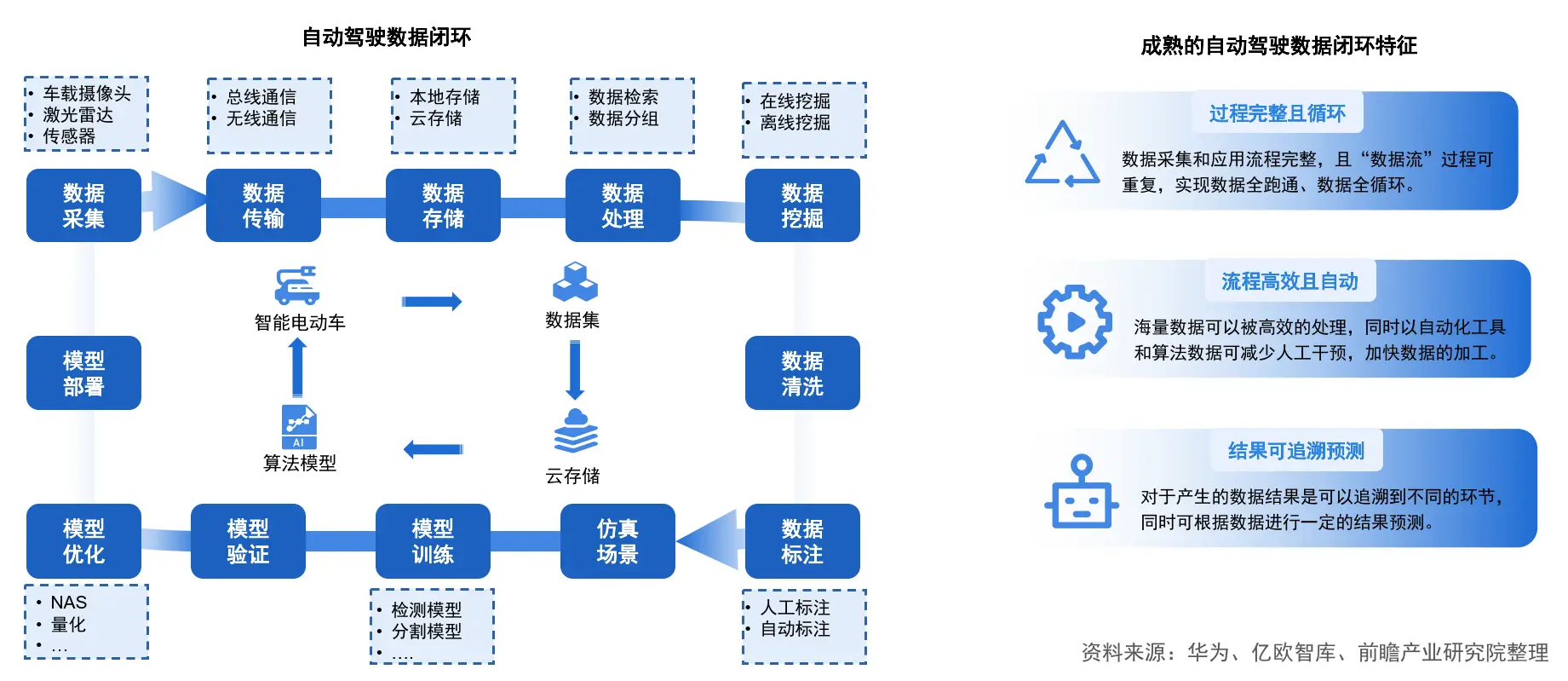
首先,由传感器采集的数据在车端实现格式标准化,经由缓存得到预处理,继而按照驾驶行为、环境参数和目标物实时标签自动进行元数据标注。在标签符合特定条件的情况下,触发事件分装。
当数据被传输到边端后,规则引擎和轻量化模型会根据不同精度做出筛选,最终获得与智驾相关的高价值数据。根据算法,此类数据经过压缩与优化得到分级存储,并根据紧急度被归入不同优先级的上传队列。在此过程中,数据还将经过脱敏处理,传输过程也将得到监控,以达到最高的合规性和安全性。
最终,数据闭环将在云端形成。在这里,从边端传入的多源数据将完成入库、标签及索引建立的步骤,并根据聚类算法实现自动化清洗,剔除冲突数据。
接下来,4D标注工具链和数据合成工具将令保留下来的有效数据得到标注和增强;此后,经过分布式模型训练、仿真验证与部署、价值评估和合规审计等环节,数据将正式完成闭环反馈与迭代。
随着边缘与云端算力的持续增强,现实数据与合成数据的深度融合成为突破高阶自动驾驶的关键路径。动态数据蒸馏技术与多模态特征对齐算法的成熟,正逐步降低系统对硬件冗余的依赖,场景泛化能力随之显著提升。
这一趋势直接推动核心感知部件成本的结构性下降。过去一年,激光雷达均价从2500元降至1200元,降幅达52%;毫米波雷达、车载摄像头、超声波雷达价格降幅介于25%-31%之间,为高阶智驾的规模化落地扫清成本障碍。
定位技术也在同步演进,从依赖激光雷达点云匹配与高精地图的传统模式,迈向无图化与端到端模型新阶段。
通过多摄像头融合生成鸟瞰图替代预置高精地图,地图维护成本大幅降低;车端海量数据构建的云端仿真环境,持续强化模型对动态场景的泛化能力;视觉感知权重的提升,进一步弱化了对激光雷达等高成本硬件的依赖。
长远来看,无图化与端到端模型仅是过渡形态。当车路云协同与自进化学习成为技术核心,芯片级集成实现突破后,基于泛在智能(Ambient Intelligence)与生成式AI的全域动态定位将成为终极形态。
从“模块化”到“端到端”的跃迁
智能驾驶算法正经历从模块化堆叠到端到端集成的革命性演进,架构创新成为技术突破的核心引擎。
端到端(end to end,E2E)架构依托单一神经网络实现“感知-决策-控制”全流程运算,直接输出车辆控制指令。其无需人工规则干预,通过海量数据训练可逼近人类直觉式决策,响应效率与复杂工况适应性显著提升,但系统泛化能力受限于车企数据规模的阈值。
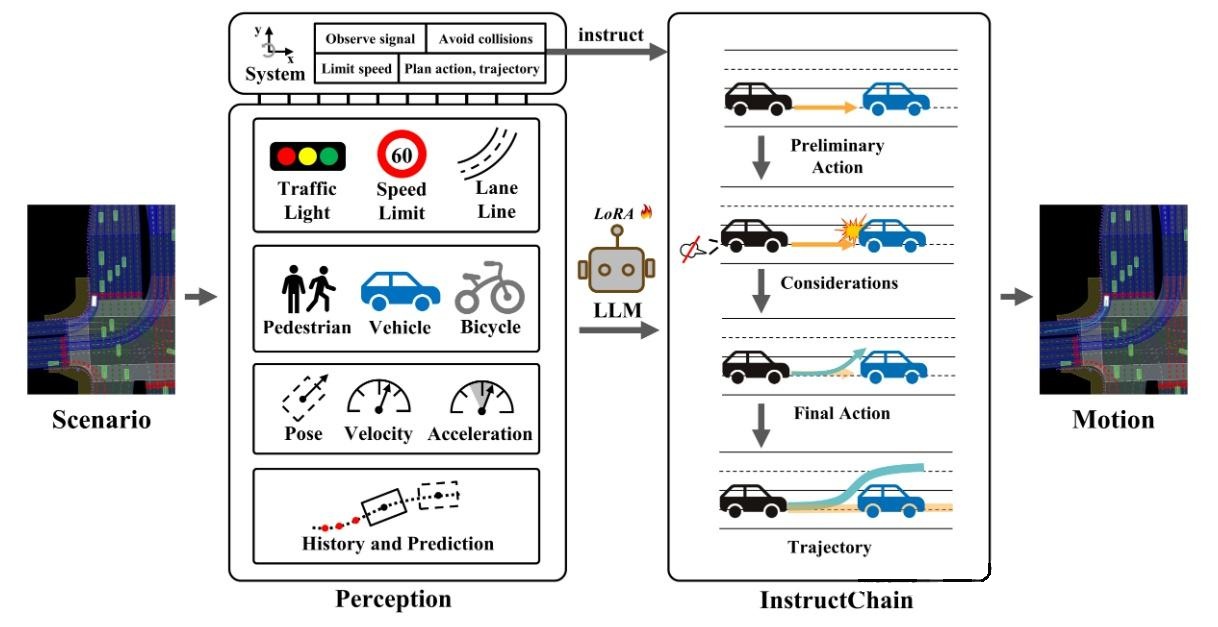
为突破这一局限,视觉-语言模型(VLM)作为增强模块应运而生,其融合视觉感知与自然语言理解能力,解析复杂交通语义并通过链式推理生成决策,与端到端架构形成“快慢协同”的决策组合系统,提升长尾场景与Corner Case的安全性。
但VLM对算力的消耗较大,且无法快速做出类似端到端那样的直觉式响应。此外,对于高精地图的高度依赖也增加了维护成本,同时令泛化能力出现折损。
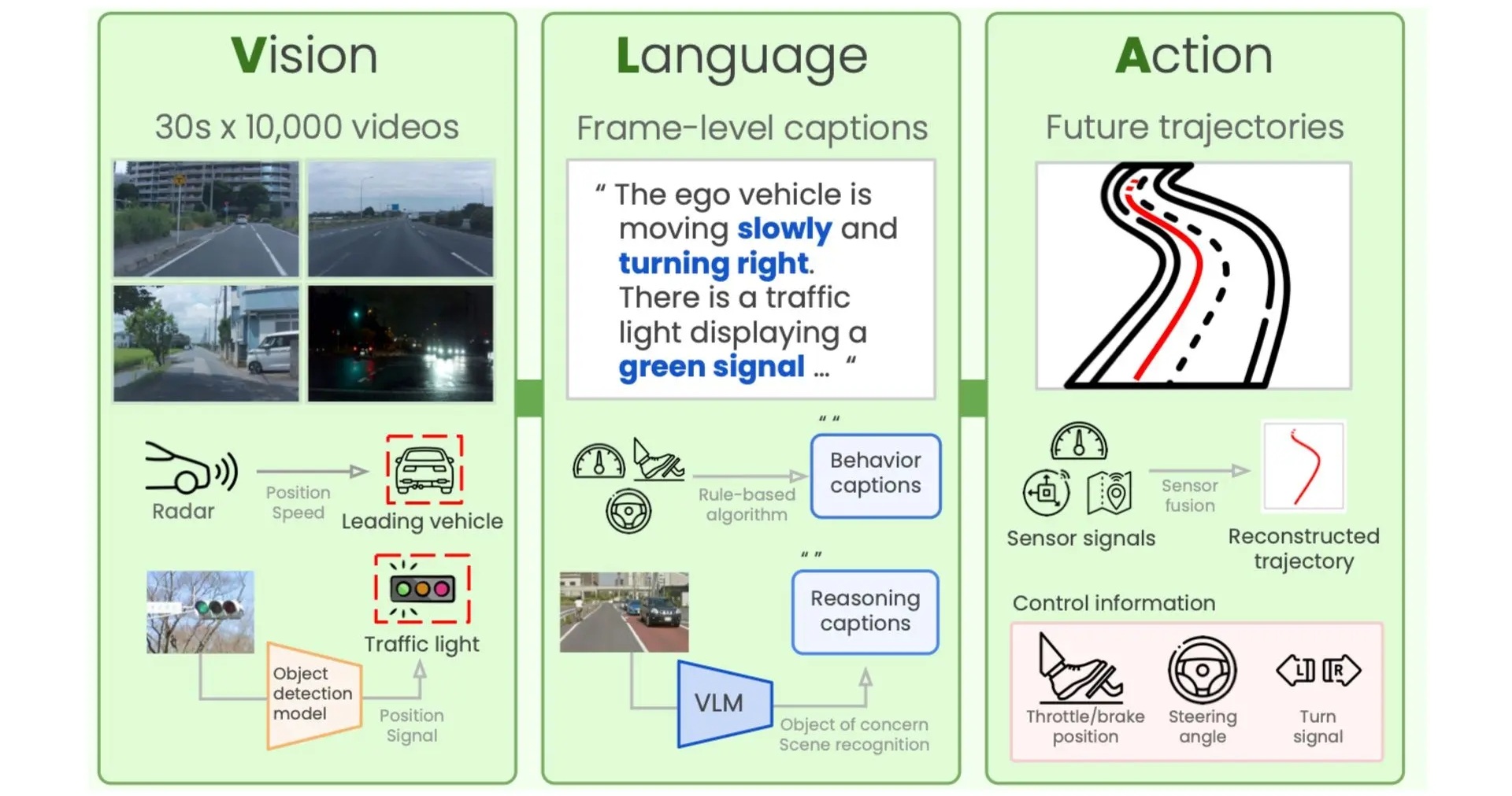
为此,智驾算法开发者在由“VLM+端到端”构成的多段式端到端架构上更进一步,设计出一套性能更强的技术组合——视觉-语言-动作模型(Vision-Language-Action,VLA)。
VLA在VLM基础上实现进阶,融合动作模态构建“视觉-语言-动作”统一模型,完成“感知-决策-执行”端到端闭环。
相比VLM和“VLM+端到端”,VLA是兼顾动作模态,形成融合视觉、语言及动作的统一模型,其将多模态信息直接嵌入驾驶决策链,在提升泛化能力的同时大幅降低对数据的依赖。
尤为重要的是,其推理过程全程可求导,可通过人机交互界面向用户直观展现推理过程和工作逻辑,增强用户使用信心。
尽管优势显著,但VLA仍面临多重挑战。VLA在同一架构中集成视觉编码器、语言编码器和动作编码器的需求,令工程化开发的难度陡增。同时,此类架构数据需求及采集成本高,导致初期训练成本过高,且多模态感知对力反馈、物理交互等具身能力的支持不足。此外,计算实时性要求与当前车域芯片算力存在矛盾,而黑箱决策风险则降低了决策的可解释性,增加调试难度等等。
因此,在VLA的研发门槛与落地成本得到有效控制前,“VLM+E2E”构成的多段式端到端架构仍是更具普惠性的主流选择。
世界模型或成“类人智驾”引擎
在很大程度上,更先进的云端算法将有助降低车端VLA架构的训练难度,快速增强其泛化能力。而眼下,云端算法自身也在经历重大的技术革新。
从数据驱动的模仿学习,到具备物理世界建模能力的生成式世界模型,云端算法发展的底层逻辑非常清晰:基于生成式AI技术,通过合成虚拟场景构建亿公里级的里程闭环仿真系统。后者不仅包含出现在现实世界中的长尾场景,还能借助时空演化预测能力,模拟车辆在未知场景中(如极端天气、交通事故等),由特定动作引发的环境变化。
此举将大幅降低算法模型训练过程中,对现实世界驾驶数据的依赖,并且可在持续生成多模态训练数据的同时,融合增强型自学习机制,对驾驶策略做出以类人化为目标的终极优化。
另一方面,不断进化的车云协同蒸馏机制将有效提升车端VLA算法架构的泛化能力,而从车端回流的实时数据则能反哺云端模型,助其合成长尾场景,驱动完成迭代,最终形成双向增强的认知进化闭环。
更加不能忽视的一点是,云端世界模型高度整合了传感器数据、交通规则、实践经验等智驾要素,因此其本质是一个能够理解、推理和预测驾驶环境的AI框架。
伴随其在感知与决策优化方面的优势,云端世界模型可提供语义信息以提升智驾系统的环境识别能力,并预测周围交通参与者的行为意图,对决策规划和车辆控制起到辅助作用。甚至在一定程度上,其出现有望取代车端的视觉语言模型,用云端算力帮助车端形成具有更高精度的场景推理能力。
目前,已有不少行业玩家开始在云端算力层面发力。例如,华为ADS 4.0公开宣称其通过云端完成了高达6亿公里的L3级智能辅助驾驶仿真验证;小鹏汽车则披露了他们通过蒸馏压缩云端模型参数,实现轻量化车端部署的计划。
此外,类似Momenta、地平线这样的第三方智驾解决方案供应商也已将世界模型与强化学习(Reinforcement Learning)相结合,对奖励函数(Reward Function)设计做出优化,令决策效率得到显著提升。
尽管世界模型已逐步成为智驾系统云端算法的重要发展趋势,但其对于数据质量、多样性以及车端实时算力的要求依然较高。此外,基于物理规则的三维建模能力,也将对其规模化商业应用构成挑战。
2025年全场景D2D功能的规模化落地,以及年底至2026年即将量产上车的L3功能,促使智能辅助驾驶第三方供应商、激光雷达厂商、线控企业、智能辅助驾驶图商、数据标注与仿真企业等愈发成为主机厂提升功能安全的关键生态伙伴。同时,全场景D2D功能带来复杂的应用场景,也使智能辅助驾驶芯片供应商更加注重感知算法的业务布局。
随着智能辅助驾驶功能的不断发展,参与企业的市场竞争正在“缩圈”,未来市场集中度也将进一步提升,能够快速响应主机厂需求以及具有AI能力的企业将脱颖而出。
当L3之门正式开启,我们看到的或许不只是方向盘短暂的“松手”,更是一场关于“智能边界”的终极叩问。
三级算力架构重构了机器的思考速度,数据闭环消解了技术落地的成本壁垒,VLA与世界模型让算法越来越接近人类的认知逻辑。可当智能辅助驾驶能处理99.99%的场景,那0.01%的未知该交给代码还是人心?
或许,智能辅助驾驶的新十年,真正的考题从不在技术参数的小数点后几位,而在每一次代码迭代时,我们是否记得,让机器学会驾驶的,从来不止是数据与算力,更是人类对于驾驶和出行最本真的期待——不是抵达终点的效率,而是路上每一刻的从容与安心。
在这扇L3的门后,藏着的从来不是技术的终点,而是人类学会如何与智能共处的新起点。
