
文 | 一财商学院
最近,灵巧手火了。
一个月内,灵心巧手、帕西尼等多家灵巧手相关公司完成过亿、数千万元融资,热度不小于人形机器人。
之前一财商学通过问卷调查发现:84.6%的消费者最希望人形机器人能在家庭服务(如做家务、搬东西、辅导孩子等)和养老服务(如照顾老人、医疗护理等)的生活服务场景中使用。
而要想机器人能真正帮人干活,除了泛化能力,最关键的就是得有一双灵巧的机械手。
作为机器人的末端执行器,理想的灵巧手需要具备负载能力、运动能力、控制能力和感知能力等等,才能够在真实的生活场景执行复杂且精细的任务。
现在的灵巧手做到什么程度了?
打开社交平台,搜索“灵巧手”,就能看到各式各样的灵巧手在花式“炫技”。
抓取物品、比耶都是基本操作,最新迭代的灵巧手能拿鸡蛋、盘球,甚至弹钢琴、玩魔方......
Linker Hand系列灵巧手
看到这儿,您估计会跟我一样感叹——世界已经发展成这样了?!那机器人岂不是马上就能帮我做家务了?
本期“怪东西”,我们一起来看看“灵巧手”都在整啥活。
01 抓鸡蛋、盘核桃,只是灵巧手的“入门考”
不知道从啥时候起,拿鸡蛋、盘核桃成了机器人企业“秀肌肉”的必备操作。
特斯拉人形机器人Optimus二代在官宣视频中展示“取蛋-传蛋-放蛋”的完整过程,仅耗时约10秒;英伟达展示智能体Eureka加持下的机械手能完成快速转笔、盘球、打开抽屉和柜子等三十多个复杂任务。
智能体Eureka加持下的机械手
现在的灵巧手真这么神了吗?一财商学盘点了市面上灵巧手产品配置,发现自由度、承载能力都在不断提升。

灵巧手行业的业内人士告诉一财商学院:最初级的灵巧手就能完成鸡蛋的抓取。包括转笔和盘球,“这在2007年前就被高校和科研院所给玩烂了”。换句话说,这些是相对成熟的技术。
那机器人公司为什么还要让灵巧手不断整“花活”呢?
我们先来搞清楚什么是灵巧手。
北京航天航空大学张玉茹院士在《机器人灵巧手》中给出定义:手指数要大于等于3,自由度要大于等于9,并且能够完成一定功能的机械手,才叫做灵巧手。
定义不好理解,离消费者也比较远,为了让“灵巧”看起来更直观,机器人公司不约而同地选择了“抓鸡蛋”作为展示灵巧手能力的保留项目。
抓鸡蛋,难也不难。
一财商学采访了国内类脑智能和灵巧操作机器人的研究型企业忆海原识,创始人及CEO任化龙告诉我们:鸡蛋作为一个相对对称的标准物体,表面非常规则,是一个连续曲面。三个指头、九个点自由度就够用了。甚至用不着灵巧手,三指爪就够了。
实际上,过去20年出现了多款历经迭代的灵巧手:20世纪末德国宇航中心研制成功的DLR-Ⅱ灵巧手(如图f)、20世纪80年代北京航空航天大学的BH系列(如图h)和浙江工业大学研发的气动柔性灵巧手(如图i)。早在上世纪,低自由度的灵巧手就已经能抓握类似鸡蛋的物体。

图源:《机器人多指灵巧手的研究现状、趋势与挑战》蔡世波等
形状这块儿好办,那鸡蛋怎么抓才不容易碎?是不是得先分清生和熟?
灵巧手工业设计师in(化名)告诉一财商学,通过触觉传感器和力学控制,分清生熟是很容易实现的。
“灵巧手的抓取部分带有触觉传感器阵列,触碰到鸡蛋后,传感器受到挤压会产生电信号变化,这个变化通过信号处理和事先训练好的机器学习模型能够反馈给系统抓取物体的特征,包括形状、硬度等等,通过逐步施加更大的力,系统会得到进一步的反馈信息,通过这些信息就能够分辨生鸡蛋和熟鸡蛋。
要完成更复杂的动作,分清生熟还不够,还得靠更多、更灵敏的传感器。
墨现科技作为专注于薄膜式触觉传感器的高科技企业,目前“电子皮肤”(薄膜式触觉传感器)已经可以实现整体包覆,包括手掌、手背以及复杂的关节部位,同时在整只手上布置超过1000个感应点。
市场负责人王鑫告诉我们,墨现科技的“电子皮肤”最小触发力度仅为5g,响应率为500赫兹,每2毫秒传输一次信号。
这意味着:别说鸡蛋,就算一只蜜蜂停留在灵巧手上也能被感知。
有了整体包覆的触觉传感器,灵巧手的感知能力大幅提升,更加向人手靠近。
因此,灵巧手也可以做到比拿鸡蛋更复杂的动作。比如说,抓着鸡蛋转来转去,就像盘核桃那样。
这不仅需要丰富的现实交互数据,还需要找到精确协调的发力动作(如下图)。因为手指转动球体的过程中会出现很多难以预设的交互——2019年,伯克利人工智能实验室发布的博客中明确写到。并在实验中提出深度动力学模型(PDDM),让机械手只用4个小时的数据就学会了盘“核桃”。

带有深度动力学模型(PDDM)的机械手在盘“核桃”
可以看出,“盘核桃”这事儿本身并不难。随着软件算法不断增强,机械手学会“盘核桃”的时间会越来越短,动作也会更加灵活。未来一定也将学会编头发、扣纽扣、系鞋带,只是时间问题。
02 日常生活才是灵巧手的“资格赛”
拿鸡蛋、盘核桃、转笔都难不倒灵巧手,那灵巧手已经无所不能了吗?
实际上,日常生活中我们以为简单的动作,对机器人来说难度更大。
任化龙告诉我们:真实场景里客观存在的问题才能解释灵巧手的技术复杂度。比如看似简单的动作——“开冰箱门”反倒可以检验灵巧手的好坏。
连球都能玩转,为啥门却打不开?开冰箱门不是很简单的一件事吗?
其实不是。
首先是力的冲击。冰箱之所以能够密封,靠的是内部磁吸的力量。在拉动冰箱门的时候需要很大的力,但刚一拉开,这个力量就突然泄下(如图)。
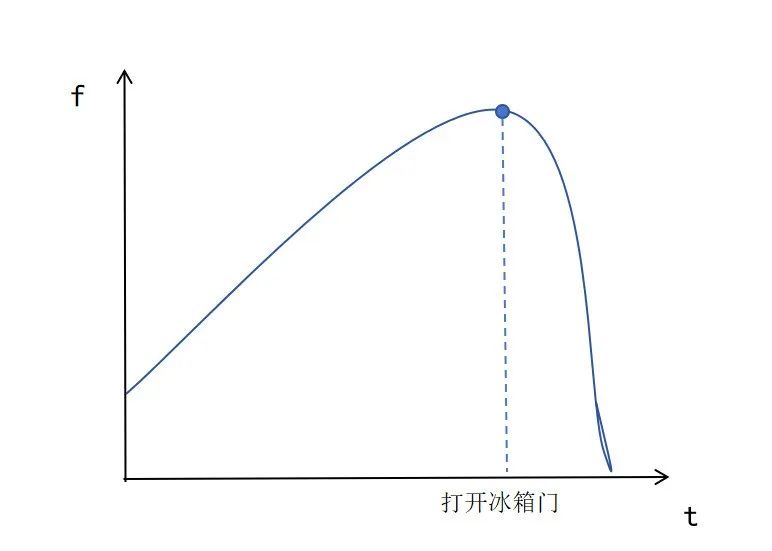
开冰箱门“力”的示意图
类似的情况还有,灵巧手接住抛过来的物体、模拟厨师颠勺......这种力的冲击有可能导致灵巧手里的传动器卡死,甚至电机损坏。这也是为什么灵巧手还迟迟没有进入日常生活,帮我们做饭洗碗。
其次就是前文提到的——适应复杂物体的能力。
就拿门把手来说,每个冰箱的门把手都不一样,这对灵巧手适应不同复杂曲面的能力要求可以说是极高的。
这一过程需要用到腕掌关节,也就是无名指、小指和腕部的交接部位。
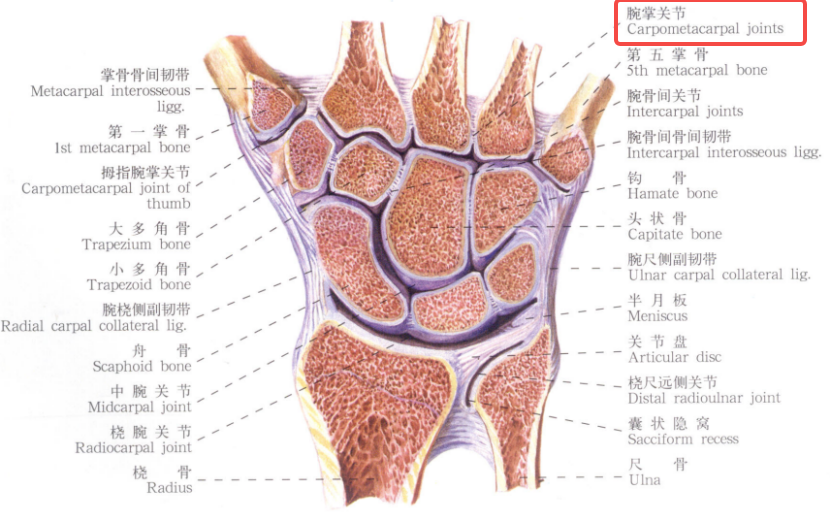
人体手掌结构图
腕掌关节对抓握复杂曲面物体极其重要。有没有提升这环节的自由度、以及自由度轴线位置的设计是否合理,是评价一个灵巧手的重要标准。
此外,人类的腕掌关节还有一个重要功能——对指动作。这是人手的独特能力,通过拇指与小指和无名指的对指,能实现更加精细的抓握。猴子的手就无法完成这样的动作,因为它们的手掌是平掌,没有腕掌关节,只能抓取类似树枝等简单物体。
从最开始的三指夹爪到多指多关节,再到如今的腕掌关节,灵巧手对人手的模拟越来越精细,灵敏度越来越高。
如果说双足机器人的人形与类人形之争尚待考量——毕竟对机器人下半身的要求只有稳和能移动,很多时候轮式或者履带式就能解决问题。
但任化龙告诉一财商学:机器人的手必须仿生,这一点是无可争议的。
因为无论是 C 端还是 B 端应用,大部分任务的解决都集中在手上。只有无限像人,才能适应真实的生活环境,完成复杂的任务。
但是人的身体过于复杂,以神经末梢的致密排布为例,光是RA1系列的神经末梢在人的指尖每平方厘米就有150个(如图)。这只是指尖,还没包括手掌。
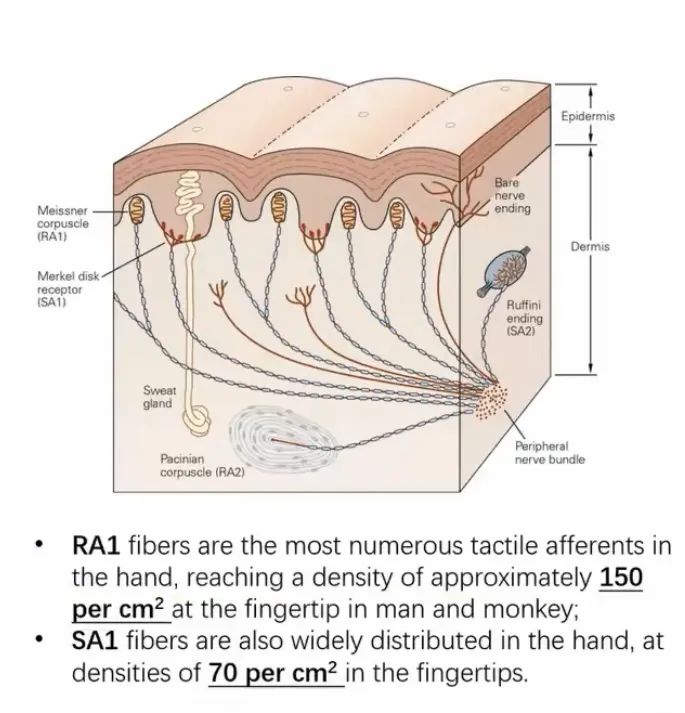
人类皮下的神经末梢分布
前面提到灵巧手上超1000个感应点和人手比起来可以说是小巫见大巫。只能说,在仿生道路上,灵巧手的探索道阻且长。
03 推开家门,还得靠灵巧手
顺利打开冰箱门能一定程度上证明灵巧手技术过关,而要推开家门,把机器人带进家庭市场,才是灵巧手的真本事。
不夸张地说,如果没有灵巧手,机器人就是一个机械大玩具,暂时不具备生活场景中的实用价值。
因为家庭场景中存在大量多类、多性质的物品,如易碎的玻璃器皿、褶皱的衣物、散落的玩具......这些物品的形状、尺寸、颜色和质地都具有不可预测性。
这就意味着,机器人没法按照预设程序执行任务,而是需要让“大脑”具备“常识”,再使用灵巧手完成操作。
装有灵巧手的机器人能够进一步感知周围环境,从而帮助机器人“大脑”自主学习和决策,最后进行复杂且精密的操作,具备随机应变的能力。
可以看出,家用场景对灵巧手的要求是“变态级”的。光是一只手上传感器的数量——位置感知觉有20-30个(纯位置检测),力检测又要几十个,再算上触觉......要想实现精细化的手部动作,少说也得上百个。
这也是为什么大多灵巧手选择先落地重工业,再逐渐向轻工业发展,最后才考虑进入生活服务领域。
那么灵巧手现在卡在哪里了?
多位灵巧手行业从业者告诉一财商学,灵巧手真正的难点在于对人手和对人体科学的理解,每一根骨头以及上面皮肤,包括神经末梢分布都有其作用,而目前灵巧手的仿生还有很长的路要走。
“最关键的点,就是仿生。如果这一点没做好,盲目提高量产或者单纯增加可靠性,你会发现解决不了问题。”任化龙表示。
那么再进一步,假设未来灵巧手仿生水平与人手相当了,机器人配得起吗?我们就能用得上吗?
从近几年灵巧手价格看,“摩尔定律”已经在生效了。
2007年,哈尔滨工业大学和德国宇航中心合作研制出的HIT/DLR 灵巧手售价在 90 万元人民币以上;
2014年,德国 SCHUNK 公司对外发布五指伺服电动机械抓手 SVH,报价超60 万元人民币;
2024年,国内灵心巧手推出的Linker Hand 客单价在5万元左右,不到”元老级“灵巧手的十分之一;
2025年3月,灵心巧手发布的入门级产品Linker Hand O7,售价8800元,将灵巧手的价格打到万元以下;
2025年5月,慧灵科技发布eHand-6灵巧手,价格低至2999元。
对于价格,任化龙表示,灵巧手这一环节的成本跟技术复杂度、市场规模和推广都有关系。“不是说技术越复杂,成本一定就越高。还要看现阶段产业化走到了哪一个周期,以及当前周期的量产程度和市场推广的规模,然后再去看价格。”
未来随着技术水平逐渐提升,一些新的市场会逐渐被打开,产品也趋向于稳定、标准化。量到足够多以后,价格也会随之降低。
这一点在灵巧手的关键配件——触觉传感器上,已经得到了验证。
目前,墨现科技为每只灵巧手提供的“电子皮肤”触觉解决方案价格大约是1000元。
市场负责人王鑫表示,目前墨现科技的“电子皮肤”解决方案在智能家居、消费类用品等领域已经实现了批量化生产,累计出货量达百万级。在自适应枕头、柔性乐器、成人用品等产品上应用广泛。尽管灵巧手和人形机器人客户的订单量还是公司一个较小的分支,但是增速非常快。“这个行业基本上都是成倍的增长。我们去年机器人这块一共有几十万,今年可能就会达到几百万。”按照他的预估,未来一个机器人的手部传感器也就多几百块钱,甚至还能更低。
或许,量产铺路下,未来灵巧手的应用也能触手可及。
参考资料:
《机器人多指灵巧手的研究现状、趋势与挑战》蔡世波等
盘核桃这么累,有条“捷径”你走不走?ATYUN订阅号
