


记者 |
在越来越复杂的人形机器人之外,也有很多研究人员用各种形态的仿生机器人,低成本地实现了更为复杂的功能。
据IEEE Spectrum报道,近日,美国卡内基梅隆大学的“机器人设计与实验”(Robot Design & experimental)课程中,一个名为ScienceParrot的学生团队推出了新版本的RHex,并将其命名为T-RHex,有着与霸王龙(Tyrannosaurus Rex)发音相同。
六足仿生机器人RHex项目最早由美国国防高级研究计划局(DARPA)赞助,包括卡内基梅隆大学、加州大学伯克利分校以及波士顿动力在内的诸多机构,都参与了该项目的开发研究。
RHex使用六条腿进行移动,相比较使用轮子或者轨道来讲,用更简化的机械设计,实现了更强的灵活性和适应性。除了能在平坦的地面上快速行走以外,RHex机器人还能爬楼梯、越过管线和大块岩石,甚至是站立起来。
T-RHex则是传统RHex的升级版。除了拥有原版RHex的性能外,T-RHex可以完成更高难度的攀爬和悬挂动作。

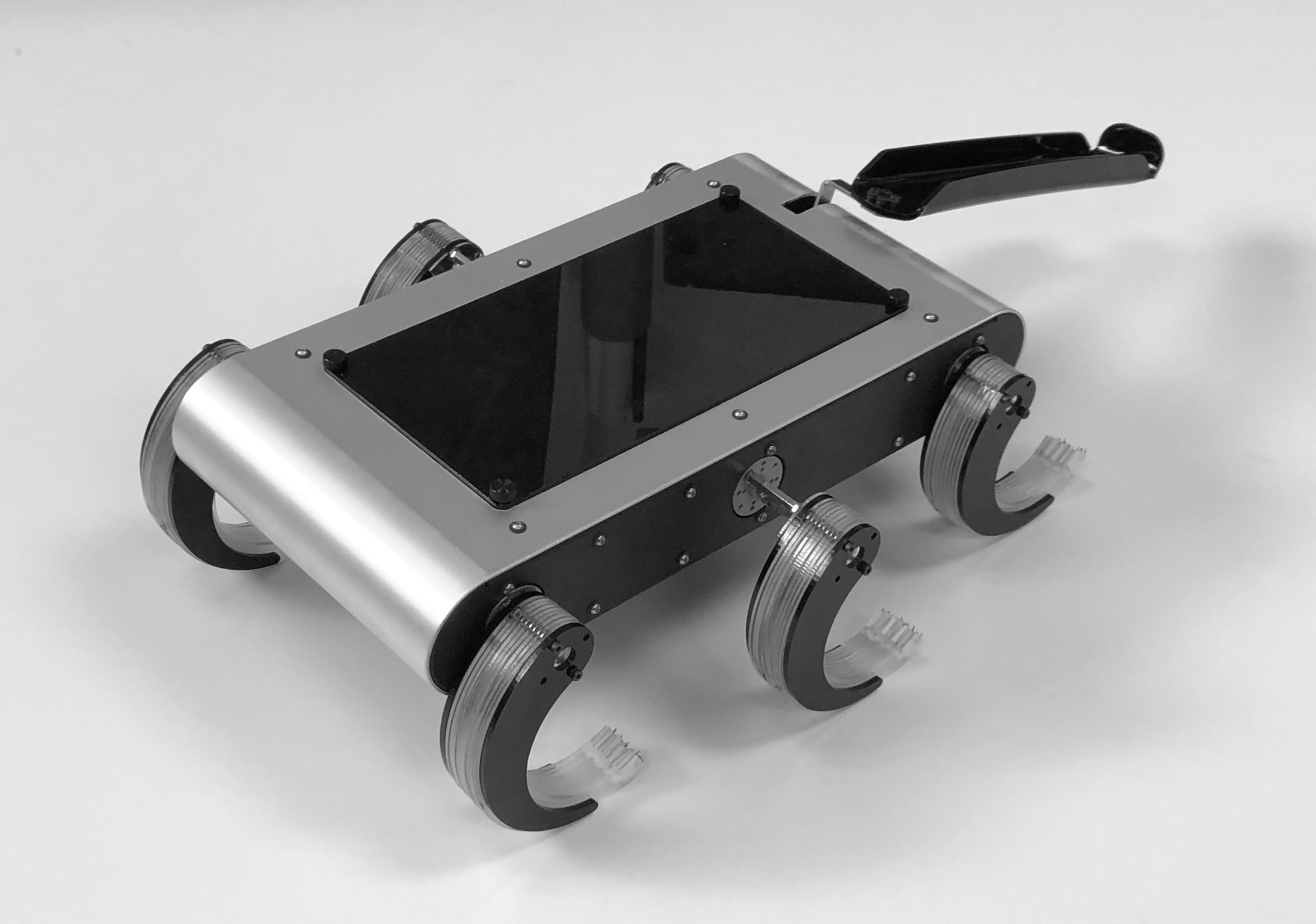
ScienceParrot团队在T-RHex半圆形腿部的末端,加上了一种特制的微型“爪子”。有了这些“爪子”,T-RHex能够在砖块、木头和混凝土等倾斜的粗糙表面上进行攀爬,甚至悬停在极为陡峭的山坡上,不至于掉落。

据研究团队介绍,目前T-RHex可以在55度倾斜角的坡面上爬动,尾部的“尾巴”可以防止T-RHex往后倾斜。
由于这些“爪子”相对比较脆弱,必须十分小心的与接触面结合、脱离,因此使用类似构件的机器人行动速度都相对有限,但T-RHex与他们不太相同。
T-RHex在平地上行动时,使用的是六条腿的“脚踝处”,而不必触及到“爪子”部分,这让T-RHex可以保持较高的行驶速度。
目前,出于成本考虑,研究团队使用丙烯酸树脂来制作机器人的腿部,丙烯酸树脂具有较强的柔韧性。

接受IEEE Spectrum采访时,ScienceParrot团队的博士生Catherine Pavlov表示,接下来会积极探索T-RHex腿部的制作材料和几何形状,未来会尝试添加传感器等设施,实现更多的功能。
此前,波士顿动力就曾推出过RHex机器人。波士顿动力版本的RHex机器人,在机身上添加了多个摄像头和照明设施,能够在远程操控下进行探测侦查作业。

除了能征服岩石、泥土、沙子、植被、铁轨和楼梯等多种地貌以外,RHex还可以实现更高难度的作业。
