
因专注研究而非产品商业化的观念分歧而被老东家谷歌母公司Alphabet出售的机器人公司波士顿动力(Boston Dynamics),日前推出了首款未来可能商业化的机器人产品。
尽管波士顿动力暂未正式公布这项最新设计,但其创始人马克·莱伯特(Marc Raibert)近日在一次投资者聚会上首次展示了这款机器人的视频,被风险投资家、SpaceX董事会成员史蒂夫·尤尔韦松(Steve Jurvetson)上传到了Youtube上。
向来以双足或四足机器人知名的波士顿动力打破常规,推出了该公司首个轮式人形机器人——“Handle”,外形类似人型机器人Atlas与电动代步车Segway的结合体,且具备自动平衡能力,可完成负载重物、下蹲甚至跨越障碍物等动作。

尽管Handle的设计较为奇异,但它的动作具有惊人的敏捷性,据说其效率远远高于其所有的“腿式前辈”。在视频中,莱伯特开玩笑地将“Handle”描述为“一个可怕到让人做恶梦的机器人”。

Handle的全身仅由两个小轮子支撑,腿状附件在关节处(膝盖)向后弯曲,它的上半身配有两个机械臂,肘部的弯曲方向与膝盖相反,看起来十分奇怪。它能够在一个从完全站立到蹲下的离地高度之间自由移动,尽管顶部附件非常重,它也不会摔倒。

“这是一个将轮与腿结合成非常动态的系统的实验,Handle能够始终保持自身平衡,并且知道如何分配重量以保持重心稳定,”莱伯特说,它比腿式机器人更有效率,但在不平坦的地面上显然存在一定权衡。
波士顿动力是闻名全球的机器人工程技术厂商,这家美国工程与机器人公司,专门开发运动机器人和人类模拟软件,主要从事机器人的快速移动、负载和拟人行为等能力的研究。
1992年,波士顿动力从麻省理工学院(MIT)分离出来独立经营,后一直从事军事项目的研发工作,与美国政府和军方关系密切,获得大量研究资金。后于2013年12月被谷歌收购,成为了组成谷歌机器人部门(Replicant)的9家公司之一。

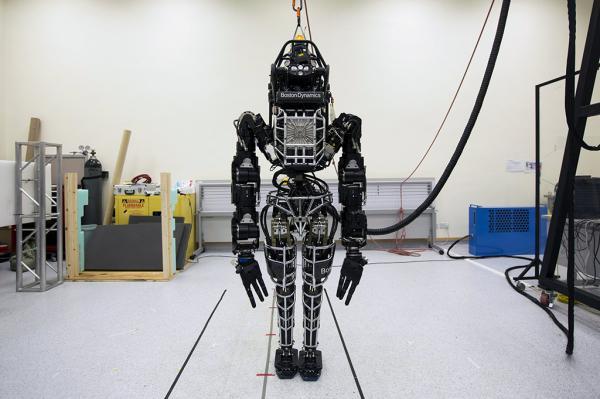
此前,波士顿动力的“机器人家族”,包括四足的仿生机器人Bigdog、WildCat和两足的类人机器人Atlas都依靠机械腿移动。
在视频中,Handle小小地炫了一把技,它在保持蹲姿或站姿的同时还能完成一些列快速旋转,甚至跳过了一个建设路障。它的移动速度非常快,但其设计决定了它的工作环境可能仅限于平滑的地形。
不同于可行走在崎岖地面,几乎可以使任何环境成为探索的理想场地的Atals,Handle的活动场域受限在平坦光滑的表面,以此凭借最小的阻力滚动。这一权衡将允许Handle在工厂或仓库环境中更快更有效地移动,在那里它不必与瓦砾或碎片打交道。
“Handle”得名于设计者对其未来应用领域的期望,即处理物件(handle objects)。在聚会现场,莱伯特暗示Handle未来可能应用于仓库类型的设置,它具备蹲下捡拾重物,并带至别处的能力。
Handle的设计理念就是携带物体,它通过调整自身重量来平衡自身的能力也有助于其在处理更重的物品时不会倒下。相比之下,“腿式前辈”Atlas躯干的灵活性十分有限,不能在抬起重物时仍保持平衡。
“它能够在相当小的占地面积上承受相当大的负载,”莱伯特表示,从根本上来说,Handle是一个实验,用于测试他们开发一个比步行机器人自由度稍低的人形机器人的潜力,并且最终成本可能因此更便宜,但仍保持相同的移动能力。
设计一个更加高效的机器人,还可处理一些像移动仓库周围物体这样基本任务。Handle肯定会对波士顿动力带来一定益处。虽然该公司此前接连展示过不少令人惊异的机器人,但生产出一个可商业化的产品一直是其努力的方向。
2015年前后,Alphabet希望将公司的先进研究转变为消费者可用的产品进行增值,但最终意识到这种复杂硬件所需的开发时间很长,因此无法将资源花费在开发时间“需要十年”的产品上,于2016年3月宣布计划出售波士顿动力,当时的潜在买家有丰田和亚马逊。
同年5月末,据《日经新闻》报道称,丰田旗下的丰田研究院耗资10亿美元收购了波士顿动力,以及谷歌在日本的机器人公司Schaft。丰田研究院成立于2015年11月,主要研究人工智能、机器人和自动驾驶技术。

